Inside the Unified Domain
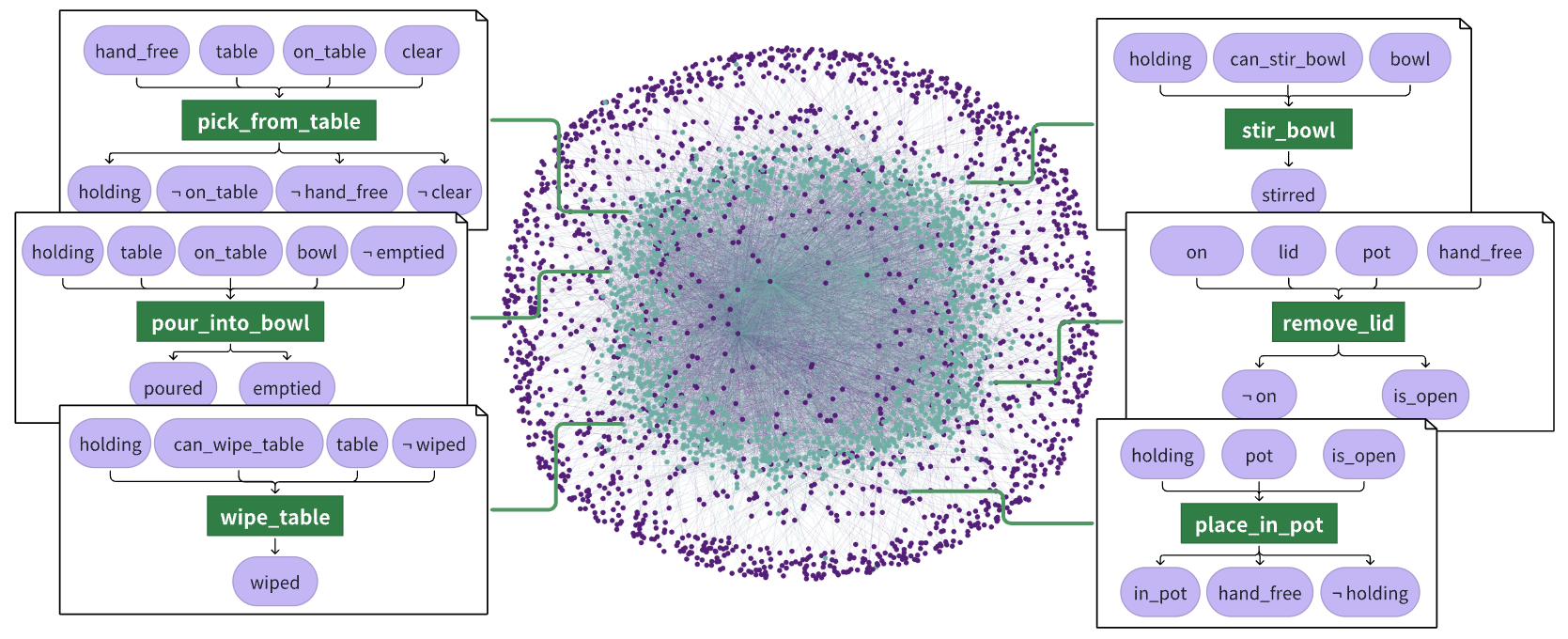
- One graph, two kinds of knowledge. In the unified domain, predicate nodes in purple describe world states, while operator nodes in green describe reusable robot actions.
- Causality is explicit. The edges capture the semantic relationships used in planning, including how predicates and operators connect through preconditions and effects.
- Local clusters reveal reusable patterns. Nearby nodes often reflect predicates and operators that frequently appear together, exposing reusable planning motifs across tasks.
Navigate in the Graph
Unified Domain (10% Sample):
A sampled view of the full graph, showing the scale and connectivity learned from demonstrations.
The Vocabulary of the Graph
- Broad Coverage. UniDomain spans 170 action categories, from everyday verbs like push and stir to fine-grained behaviors such as scrunch and rub. The compact meta-domain still preserves rich semantic knowledge for efficient planning.

Meta Domain