RoPL
RoPL
Tour
News
People
Publications
Contact
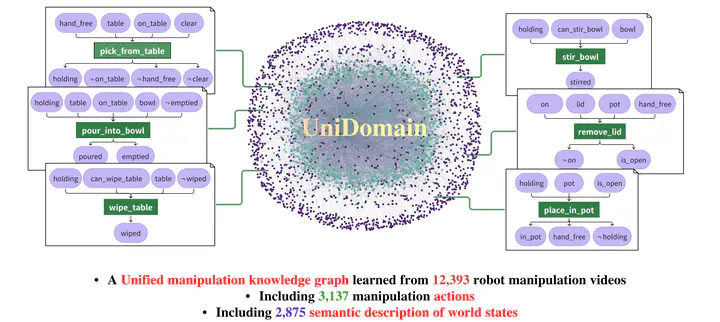
Pretraining a Unified PDDL Domain from Real-World Demonstrations for Generalizable Robot Task Planning
Haoming Ye
,
Yunxiao Xiao
,
Cewu Lu
,
Panpan Cai
January 2025
PDF
Cite
Project
Type
Journal article
Publication
arXiv preprint arXiv:2507.21545
Cite
×