RoPL
RoPL
Tour
News
People
Publications
Contact
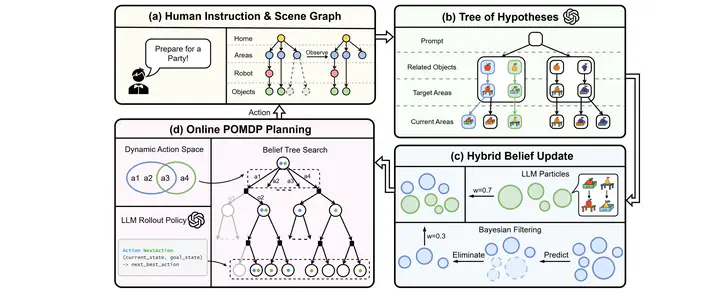
Tru-POMDP: Task Planning Under Uncertainty via Tree of Hypotheses and Open-Ended POMDPs
Wenjing Tang
,
Xinyu He
,
Yongxi Huang
,
Yunxiao Xiao
,
Cewu Lu
,
Panpan Cai
January 2025
PDF
Cite
Type
Journal article
Publication
arXiv preprint arXiv:2506.02860
Cite
×