RoPL
RoPL
Tour
News
People
Publications
Contact
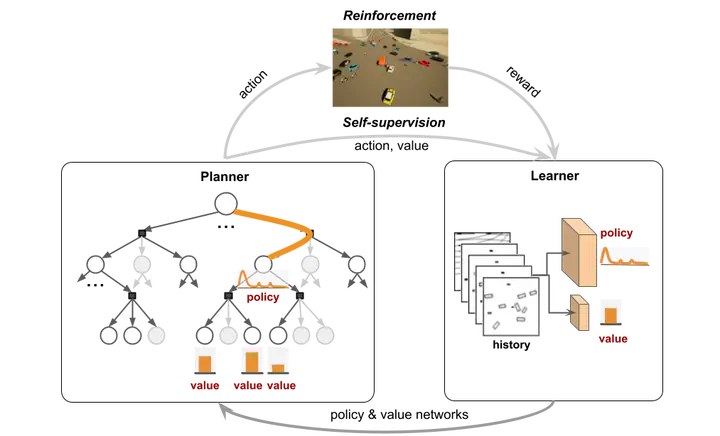
Closing the planning--learning loop with application to autonomous driving
Panpan Cai
,
David Hsu
January 2022
PDF
Cite
Type
Journal article
Publication
IEEE Transactions on Robotics
Cite
×