RoPL
RoPL
Tour
News
People
Publications
Contact
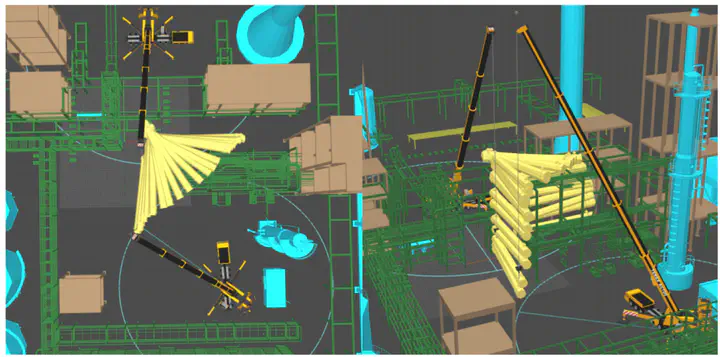
Automatic path planning for dual-crane lifting in complex environments using a prioritized multiobjective PGA
Panpan Cai
,
Indhumathi Chandrasekaran
,
Jianmin Zheng
,
Yiyu Cai
January 2017
PDF
Cite
Type
Journal article
Publication
IEEE Transactions on Industrial Informatics
Cite
×